坎巴拉太空计划RemoteTech2攻略
坎巴拉太空计划里面最新一部mod名称是RemoteTech2,新加入的部件可新的元素可以给玩家带来更多的游戏体验,可能很多新手玩家对这部mod不太了解,下面是详细攻略解析。
RemoteTech2攻略
天线
 通信距离:50Mm;手动打开;耗电量:0.82(耗电量什么的基本上无关紧要)
通信距离:50Mm;手动打开;耗电量:0.82(耗电量什么的基本上无关紧要)
 通信距离:2.5Mm;手动打开(其实在这个版本里所有的天线都是手动打开) ;耗电量:0.13
通信距离:2.5Mm;手动打开(其实在这个版本里所有的天线都是手动打开) ;耗电量:0.13
 通信距离:40Gm;手动打开;耗电量:0.93
通信距离:40Gm;手动打开;耗电量:0.93
 通信距离:90mm;手动打开;耗电量:0.82
通信距离:90mm;手动打开;耗电量:0.82
 通信距离:60Gm;手动打开;耗电量:0.93(和上面那个相比明显效能更好)
通信距离:60Gm;手动打开;耗电量:0.93(和上面那个相比明显效能更好)
 通信距离:500km(和上一代的简直是天壤之别啊);手动打开;耗电量:0.01(不如没有耗电量)
通信距离:500km(和上一代的简直是天壤之别啊);手动打开;耗电量:0.01(不如没有耗电量)
 通信距离:3Mm;手动打开;耗电量:0.18
通信距离:3Mm;手动打开;耗电量:0.18
 通信距离:5Mm;手动打开;耗电量:0.6
通信距离:5Mm;手动打开;耗电量:0.6
 通信距离:400Gm(对这个天线我只能说呵呵了)(先看下面那个天线效果更佳);手动打开;耗电量:2.8(这个天线需要注意的是,千万千万不能和其他碟形天线挤在一起)
通信距离:400Gm(对这个天线我只能说呵呵了)(先看下面那个天线效果更佳);手动打开;耗电量:2.8(这个天线需要注意的是,千万千万不能和其他碟形天线挤在一起)
 通信距离:350Gm(据介绍所说它可以到达太阳系中几乎任意一个角落);手动打开;耗电量2.6
通信距离:350Gm(据介绍所说它可以到达太阳系中几乎任意一个角落);手动打开;耗电量2.6
以上是所有天线种类
然后是碟形天线大集合(为了方便我将所有需定向的天线称碟形天线,以下称dish;其余下称为antenna)

然后是各种界面
 这个位于地图模式右下角(在雷达站也可以看到)。
这个位于地图模式右下角(在雷达站也可以看到)。
由左向右:
第一个按钮:当前状态为显示从发射场或其他地面控制站到你正控制的卫星/载人飞船所经过的路线(我知道有点长,但是为了表述准确只能这样了(←加上这句更长了好不))。按一下不显示(需要注意的是,在这个版本中,【【所有】】的通讯线路都会显示(其他的显示为黄色),而这个按钮按了之后只会不显示到你这儿的线路)
第二个按钮:各种貌似没什么用,也许是为以后的功能加的
第三个按钮:当前状态是全部显示通讯线路;按一下会变为一个叉,即全不显示;再按一下会变为右边的那个天线状的,即只显示由antenna中继的;又按一下会变为左边那个圆的(即最右边的那个按钮的图案),即只显示有dish中继的;最后按一下就变回来
第四个按钮:dish选择目标列表(至于怎么选择不需要我说吧),每一个dishg默认为No
Tar-
get。同时也可用这个天线改飞行器名字,点击列表右上方name再修改即可
以下是RT2的各种状态表,位于你经常点击、使用的时间加速的下方(如果你用的, 。就当我没说)
 是“当地控制”(我知道这种译法不妥),即当前由你的载人舱自行控制
是“当地控制”(我知道这种译法不妥),即当前由你的载人舱自行控制
 一般情况,D+数字
一般情况,D+数字
是表示延迟(据说延迟目前还未加入游戏中)
 没有信号连接。(这时你的卫星会自动切换成没电状态——你不能操纵它(连飞控计算机也不可以(提前设定的除外))
没有信号连接。(这时你的卫星会自动切换成没电状态——你不能操纵它(连飞控计算机也不可以(提前设定的除外))
此外还有有一种显示为N/A(抱歉图没截下来),意为没有天线(此处指各种天线),当载人舱没有天线时有时也会显示为这样(有时会显示为local
control)。至于后果,你应该懂了吧(还是那句话,载人舱除外(谁叫坎星医疗部给每个小绿人装上了jeb的大脑呢))

然后是对于通信线路的介绍。
图中,黄线是dish的通信线路,绿线是当前你的卫星的通讯线路,淡黄色为antenna通信线路(被那个绿线挡住了,不过还是说一下);红点是控制站(建立控制站的方法:6个小绿人+一个最大的无人卫星核心+你希望的天线)
另外,目前只有有dish时才能由中继进行中继。
而且如果你的卫星与中继考的特别近时,需antenna指向且双方各有一个dish时才能中继;但隔的很远时则没有这项需求

1、黄色部分为地半球,蓝色部分为天半球
2、地半球与天半球的交界线为地平线
3、粗黄色线的为N线,与之在一个平面上构成一个圆的另一个半圆为S线
4、在天半球部分,最高纬度点为N点;在地半球部分,最高纬度点为S点
5、N线与地平线交点为N-地点;类似的,S线与地平线交点为S-地点
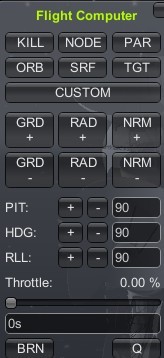
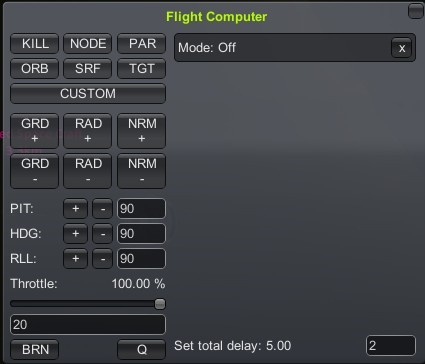
然后是喜闻乐见的飞控计算机。
由上向下:前两行:选择参照模式的。
KILL:Kill
Rotation,也就是消除旋转,可以近似理解为保持当前姿态。
NODE:Maneuver
Node,也就是对准变轨节点预先设计好的加速方向。
PAR:Parallel,也就是与目标姿态保持平行的方式,一般用于对接。
ORB:Orbit,即轨道模式,这个不多讲,都知道。
SRF:Surface,即地面模式,不多讲。
TGT:Target,目标模式,即以你选择的目标作为参照物。
第三行:CUSTOM:执行当前选择。(其实我觉得没较大用处,因为许多按钮时立即执行的)
第四、五行:选择指向方向:GRD+是向运动方向,GRD-是向逆运动方向;
GAD+是向N点,GAD-是向S点;
NRM+是向N-地点,NRM-是向S-地点
第六、七、八行:自定义旋转角度等
PIT:设定仰角,相对于陀螺仪上的地平线
HDG:相对于N线的偏航
RLL:滚转
以上三者需按CUSTOM执行
第九行:调整推力,这个都懂,拉滑块调整
第十行:燃烧时间/增速量,需加单位使mod分辨。默认为燃烧时间。
Q:详细信息(打开后如下图所示)(也就是显示准备或正在执行的动作),下方的set什么什么的(原谅楼主的懒),是设定延时点火。
对于一个动作的设定:需要设定朝向(不设定的话是以当前为设定朝向),设定推力、燃烧时间/增速量,也可以设定延迟时间。设置完成按回车确认。然后可以按BRN建立动作








相关文章
更多+热门搜索
手游排行榜
- 最新排行
- 最热排行
- 评分最高






-
 其他游戏 大小:30.39MB
其他游戏 大小:30.39MB -
 角色扮演 大小:776.13MB
角色扮演 大小:776.13MB -
 角色扮演 大小:8.15MB
角色扮演 大小:8.15MB -
 角色扮演 大小:18.61MB
角色扮演 大小:18.61MB -
 体育竞技 大小:435.88 MB
体育竞技 大小:435.88 MB




-
 冒险解谜 大小:98M
冒险解谜 大小:98M -
模拟经营 大小:100MB
-
飞行射击 大小:92.4M
-
其他游戏 大小:61.64MB
-
应用软件 大小:39.04 KB