《坎巴拉太空计划》空间站对接_详尽图文攻略
1966年3月16日,“双子星座8号”飞船,与无人飞行器“阿金纳”对接, 实现了两个航天器之间的首次交会对接。
第一节:空间站组成
除了普通火箭的组成部分,空间站到底还需要什么呢?

首先我们需要两个带有对接端口的飞行器,上面两个是模型大家可参考一下。首先要有一个带端口的飞行器在轨、
以上两枚火箭存档我会在底下附件留出,仅供参考与练习。
太空舱大家可以换成载人的。
第二节:界面与操作
点击速度显示框可以更换速度显示模式。有两组交汇点,显示的颜色不一样,大家注意分辨。
正向标记,对准时飞行器正对目标。
反向标记,对准时飞行器背对目标。
平移模式(LIN)操作:
W向前平移0.18.0
S向后平移0.18.0
A向左平移0.18.0
D向后平移0.18.0
Q翻滚(顺时针)0.18.0
E翻滚(逆时针)0.18.0
左Shift向上平移0.18.0
左Control向下平移0.18.0
空格切换转向模式0.18.0
转向模式(ROT)操作:
W俯仰(上)0.18.0
S俯仰(下)0.18.0
A偏航 (左) 0.18.0
D偏航 (右) 0.18.0
Q翻滚(顺时针)0.18.0
E翻滚(逆时针)0.18.0
左Shift0.18.0
左Control0.18.0
空格切换平移模式0.18.0
更多相关讨论请前往:坎巴拉太空计划论坛
>>查看坎巴拉太空计划全部攻略
1966年3月16日,“双子星座8号”飞船,与无人飞行器“阿金纳”对接, 实现了两个航天器之间的首次交会对接。
第一节:空间站组成
除了普通火箭的组成部分,空间站到底还需要什么呢?
首先我们需要两个带有对接端口的飞行器,上面两个是模型大家可参考一下。首先要有一个带端口的飞行器在轨、
以上两枚火箭存档我会在底下附件留出,仅供参考与练习。
太空舱大家可以换成载人的。
第二节:界面与操作
点击速度显示框可以更换速度显示模式。有两组交汇点,显示的颜色不一样,大家注意分辨。
正向标记,对准时飞行器正对目标。
反向标记,对准时飞行器背对目标。
平移模式(LIN)操作:
W向前平移0.18.0
S向后平移0.18.0
A向左平移0.18.0
D向后平移0.18.0
Q翻滚(顺时针)0.18.0
E翻滚(逆时针)0.18.0
左Shift向上平移0.18.0
左Control向下平移0.18.0
空格切换转向模式0.18.0
转向模式(ROT)操作:
W俯仰(上)0.18.0
S俯仰(下)0.18.0
A偏航 (左) 0.18.0
D偏航 (右) 0.18.0
Q翻滚(顺时针)0.18.0
E翻滚(逆时针)0.18.0
左Shift0.18.0
左Control0.18.0
空格切换平移模式0.18.0
更多相关讨论请前往:坎巴拉太空计划论坛
>>查看坎巴拉太空计划全部攻略
1966年3月16日,“双子星座8号”飞船,与无人飞行器“阿金纳”对接, 实现了两个航天器之间的首次交会对接。
第一节:空间站组成
除了普通火箭的组成部分,空间站到底还需要什么呢?
首先我们需要两个带有对接端口的飞行器,上面两个是模型大家可参考一下。首先要有一个带端口的飞行器在轨、
以上两枚火箭存档我会在底下附件留出,仅供参考与练习。
太空舱大家可以换成载人的。
第二节:界面与操作
点击速度显示框可以更换速度显示模式。有两组交汇点,显示的颜色不一样,大家注意分辨。
正向标记,对准时飞行器正对目标。
反向标记,对准时飞行器背对目标。
平移模式(LIN)操作:
W向前平移0.18.0
S向后平移0.18.0
A向左平移0.18.0
D向后平移0.18.0
Q翻滚(顺时针)0.18.0
E翻滚(逆时针)0.18.0
左Shift向上平移0.18.0
左Control向下平移0.18.0
空格切换转向模式0.18.0
转向模式(ROT)操作:
W俯仰(上)0.18.0
S俯仰(下)0.18.0
A偏航 (左) 0.18.0
D偏航 (右) 0.18.0
Q翻滚(顺时针)0.18.0
E翻滚(逆时针)0.18.0
左Shift0.18.0
左Control0.18.0
空格切换平移模式0.18.0
更多相关讨论请前往:坎巴拉太空计划论坛
>>查看坎巴拉太空计划全部攻略
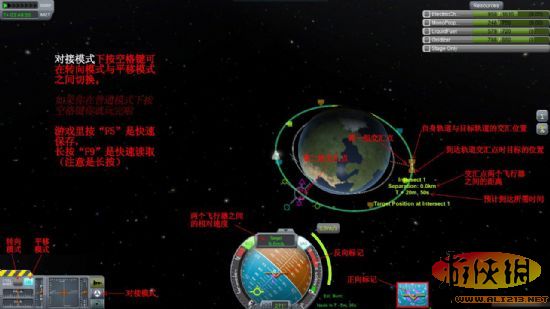
第三节:对接轨道调整
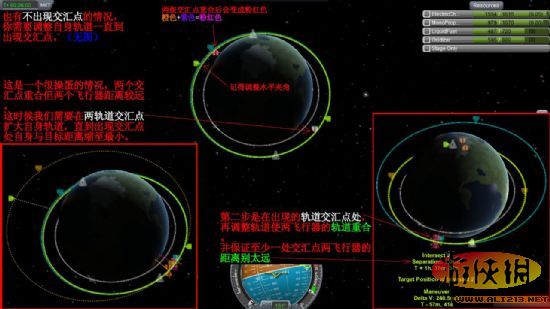
想对接自然要先调整轨道
大家按上图的方法调整好后,应该能得到下图的效果
等两各飞行器接近(还没到)交汇点时,再进入对接模式。
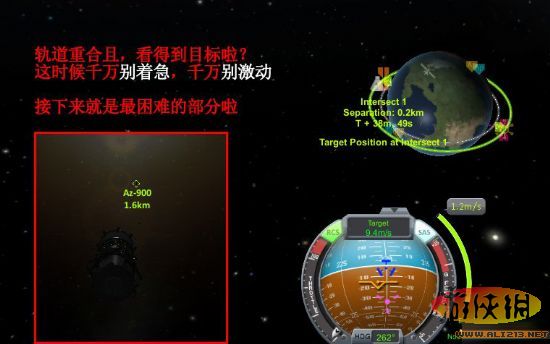
第四节:开始对接
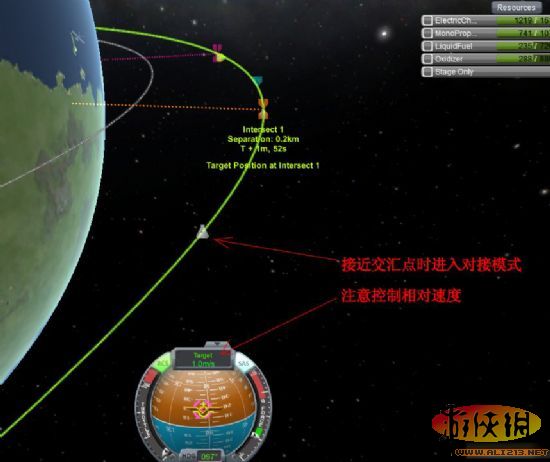
就是下图的情况,进入对接模式吧
这时候一定要注意相对速度。

这个时候你需要让飞行器对准目标(看螺旋仪),慢慢向目标靠近。注意:请看第一节的操作说明!
在十分接近的时候,需要减速至0.2m/s之下,再调整对接端口使其对齐,此时螺旋仪上的正反标记已经不需要看了。

对接好后马上把SAS和RCS关掉。如果空间站在晃,按"F5"快速存档,然后快进,散架了再长按"F9"载入,然后脱离空间站,重新对接。
最后调整左边的顺序,将多余部分脱离(也可以保留),扔大海里吧。
第一阶段的教程算是写完了,下次不知道要写什么?大家有什么好的意见和建议请在回帖里留言。
下一章要写什么教程全看大家需要了。
更多相关讨论请前往:坎巴拉太空计划论坛
>>查看坎巴拉太空计划全部攻略
第三节:对接轨道调整
想对接自然要先调整轨道
大家按上图的方法调整好后,应该能得到下图的效果
等两各飞行器接近(还没到)交汇点时,再进入对接模式。
第四节:开始对接
就是下图的情况,进入对接模式吧
这时候一定要注意相对速度。
这个时候你需要让飞行器对准目标(看螺旋仪),慢慢向目标靠近。注意:请看第一节的操作说明!
在十分接近的时候,需要减速至0.2m/s之下,再调整对接端口使其对齐,此时螺旋仪上的正反标记已经不需要看了。
对接好后马上把SAS和RCS关掉。如果空间站在晃,按"F5"快速存档,然后快进,散架了再长按"F9"载入,然后脱离空间站,重新对接。
最后调整左边的顺序,将多余部分脱离(也可以保留),扔大海里吧。
第一阶段的教程算是写完了,下次不知道要写什么?大家有什么好的意见和建议请在回帖里留言。
下一章要写什么教程全看大家需要了。
更多相关讨论请前往:坎巴拉太空计划论坛
>>查看坎巴拉太空计划全部攻略







相关文章
更多+热门搜索
手游排行榜
- 最新排行
- 最热排行
- 评分最高








-
 休闲益智 大小:77MB
休闲益智 大小:77MB -
 动作塔防 大小:58M
动作塔防 大小:58M -
 角色扮演 大小:155MB
角色扮演 大小:155MB -
 主机游戏 大小:1G
主机游戏 大小:1G -
 角色扮演 大小:259.52MB
角色扮演 大小:259.52MB




